
摘要:2026年4月,谷歌发布了其机器人专用模型Gemini Robotics-ER 1.6的重大升级。此次升级的核心突破之一,是让机器人首次具备了高精度识别并读取各类工业仪表的能力。通过与波士顿动力合作,这项技术已应用于Spot四足机器人,使其能够自主完成设备巡检任务。这标志着机器人的“眼睛”从识别物体,进化到了理解复杂仪表信息的新阶段,为工业自动化、智能运维等领域带来了革命性变化。
一、 重磅升级:从“看得见”到“看得懂”
传统工业巡检中,读取遍布厂区的压力表、液位计、温度计等仪表是一项枯燥、易出错且无法间断的工作。尽管此前已有AI轨道巡检机器人等方案尝试解决这一问题,但让机器人通用模型真正“理解”仪表盘,一直是个难题。
2026年4月15日,谷歌发布的Gemini Robotics-ER 1.6模型打破了这一瓶颈。此次升级并非小修小补,而是在多项关键推理能力上实现了飞跃:
- 空间与物理推理能力显著提升:新模型在点位定位(识别图中物体的精确位置)和计数任务上成功率高达80%,远超此前版本,减少了“幻觉”错误(如识别不存在的物体)。
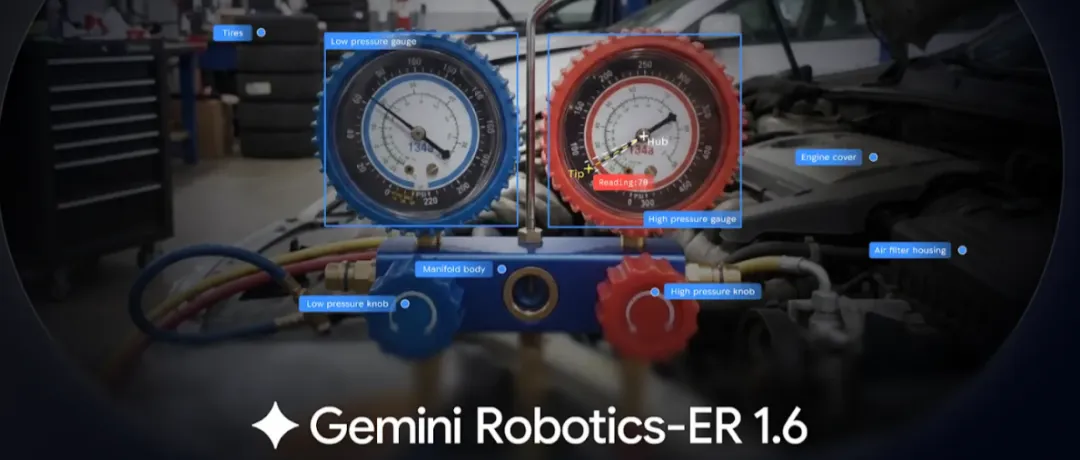
- 新增核心能力——仪表读数:这是本次升级的最大亮点。该功能专为高精度工业任务设计,使机器人能够读取圆形压力表、垂直液位计乃至现代数字设备。
- 惊人的性能飙升:在结合了Agentic Vision(智能体视觉)技术的仪表读数任务中,其成功率达到了93%。相比之下,半年前的上一个版本成功率仅为23%,性能提升超过300%。
这项升级意味着,机器人不再仅仅是一个执行固定程序的设备,而是成为了一个能够观察、分析并理解物理世界状态的智能体。
Gemini Robotics-ER 1.6
二、 工作原理:机器如何“读懂”指针与刻度?
让机器人读取仪表,远非简单的图像识别。它需要完成一个复杂的视觉推理过程:系统必须精确感知指针、液位面、刻度线、数字、单位标识等多种视觉元素,并理解它们之间的空间和逻辑关系。
谷歌Gemini Robotics-ER 1.6实现高精度读数的核心,在于其采用的 “Agentic Vision”(智能体视觉) 技术。这并非一步到位的识别,而是一个模拟人类“仔细端详”的思考过程:
- 观察与聚焦:模型会先“放大”图像,更清晰地观察仪表细节。
- 分析与标注:通过点位标注出关键部件(如指针尖端、刻度线)。
- 计算与推理:结合代码执行,估算比例、角度和量程区间。
- 整合与输出:综合所有信息,计算出精确读数,并理解其物理含义(例如,识别出单位是“MPa”还是“℃”)。
这套技术思路与业界其他先进方案不谋而合。例如,在GitHub上开源的RailBot项目中,针对不同类型的仪表也采用了量身定制的识别方案:
- 对于指针表:最终采用了稳定可靠的模板匹配法,即先分类仪表类型,再用预存的模板进行比对,抗光线干扰能力强。
- 对于数字表:推荐使用CRNN + CTC序列识别模型,能有效解决小数点检测的难题,标注和训练效率高。
- 对于指示灯/开关:直接将其不同状态(如红灯亮/灭)作为独立类别进行多分类识别,准确率极高(AP值达0.996)。
这些方法都体现了从“感知”到“认知”的演进,是机器人视觉系统发展的必然方向。
三、 应用场景:解放人力,赋能智能运维
具备“读表”能力的机器人,其应用场景将极大地拓展工业自动化和设备运维的边界。它能够替代人工,在恶劣、危险或重复性的环境中执行7×24小时不间断的精准监测。
结合谷歌与波士顿动力的合作案例及其他行业应用,其核心使用场景包括:
| 应用领域 | 具体任务与价值 |
|---|---|
| 电力与能源巡检 | 变电站、配电房内自动读取电压、电流表计,识别设备指示灯状态,实现无人值守巡检。 |
| 工业生产线监控 | 监测压力、流量、温度等工艺参数仪表,及时发现异常,保障生产安全与质量。 |
| 数据中心与机房运维 | 轨道或轮式机器人自动巡查服务器机柜的指示灯、温湿度仪表,结合红外热成像预防故障。 |
| 公共设施与危化品管理 | 检查管道压力表、化学储罐液位观察窗,避免泄漏和安全事故,适用于人类不宜久留的环境。 |
| 智能楼宇与实验室 | 监控 HVAC 系统仪表、实验室设备读数,实现能源管理和实验数据的自动化采集。 |
以波士顿动力的Spot机器人为例,在搭载此模型后,它已能实现全自主巡检:在工业厂区内自主行走,定位仪表,准确读数,并判断任务是否完成,从而决定下一步行动。这标志着机器人正从受控的“执行者”,向具备一定自主决策能力的“协作者”转变。
结语:更智能,也更需安全
谷歌此次升级不仅关注能力的飞跃,也强调了安全性的系统性提升。Gemini Robotics-ER 1.6被设计为能更好地遵守物理安全约束,例如判断哪些物体适合抓取,识别环境中的潜在风险等。这回应了机器人走向大规模现实应用的核心关切:真正的智能化,必须建立在可靠的安全基础之上。
机器人“看懂”仪表盘,虽是一个具体的技术突破,却象征着具身智能向真实物理世界迈出的坚实一步。当机器人能够自主解读这些工业世界的“语言”时,一场关于自动化、运维效率和安全生产的变革,已然悄然开始。
文章来源:本文信息综合编译自谷歌官方发布及行业分析,并参考了开源项目RailBot的技术解析、AI智能轨道巡检机器人的应用介绍、多模型联动表计识别方法以及机器人视觉系统的科普资料。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...