
摘要: 沉寂4年后,小米人形机器人CyberOne以V2版本低调回归。它没有表演后空翻,而是安静地递伴手礼、在工厂里打螺丝。这次更新的核心不再是双腿能跑多快,而是那双按照1:1成年男性比例打造、甚至会像人一样“出汗”散热的仿生灵巧手。从全掌触觉手套的数据采集,到克服AI“偷懒效应”的VLA大模型,小米正试图跨越具身智能最大的硬件瓶颈,让人形机器人真正走进工厂与生活。
当人形机器人赛道充斥着后空翻、跑酷和半马破纪录的喧嚣时,小米最新亮相的机器人却显得有些“格格不入”。
在前几天的小米投资者大会上,小米CyberOne V2第一次公开亮相。它没有跑跳,只是安静地站在那儿,像个训练有素的礼仪人员,给嘉宾递伴手礼,与人握手、击掌。
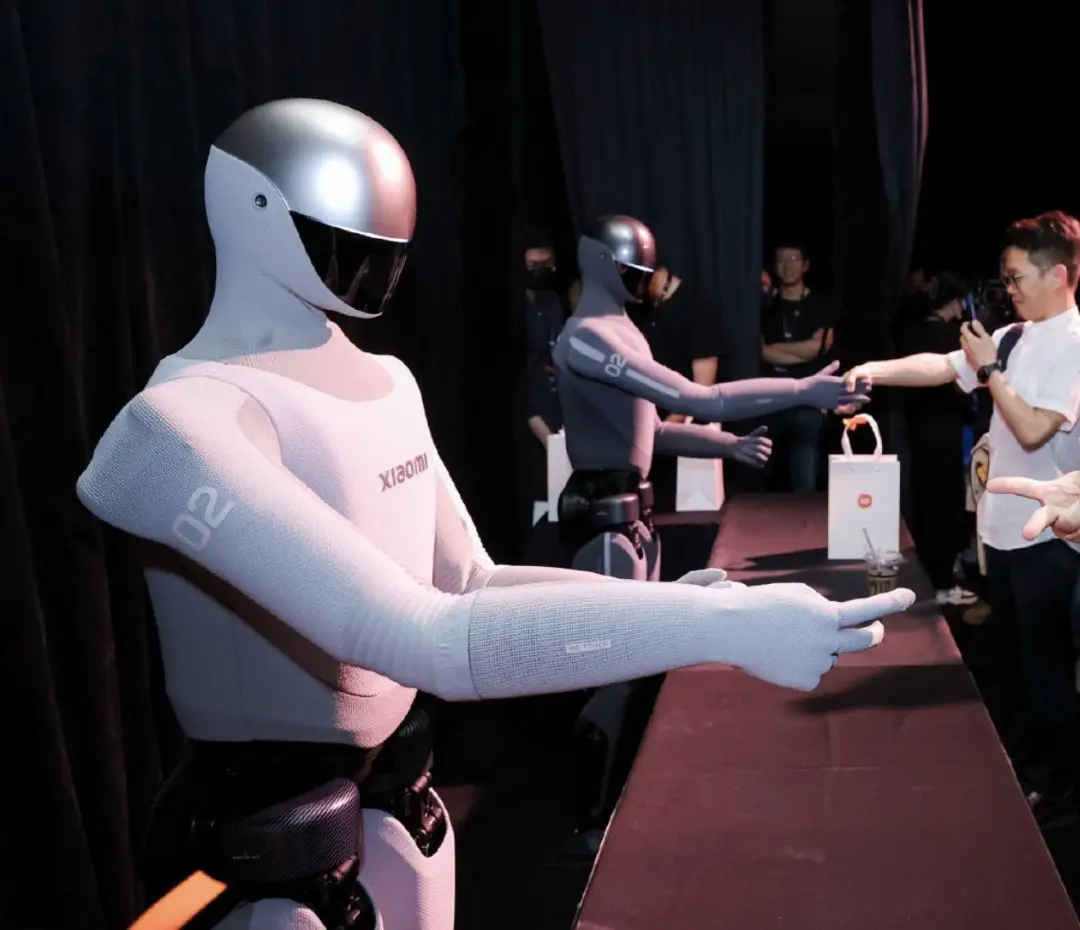
小米CyberOne V2
如果你了解小米机器人的前世今生,就会明白这份“安静”有多来之不易。早在2022年8月,小米就抢在特斯拉Optimus之前高调发布了首代CyberOne,风头无两。但此后四年,它却仿佛人间蒸发,甚至有媒体想报道时,还被小米公关明确“婉拒”。
这四年,全球人形机器人行业日新月异,特斯拉Optimus持续迭代,Figure AI频频刷榜,宇树科技等国内新锐也快速崛起。小米去哪了?答案是:在补课。就像当年造车前把新能源产业链投了一遍一样,雷军旗下的资本在过去四年疯狂投资了15家机器人上下游企业,从电机减速器到灵巧手,从具身智能模型到外观交互,补齐了整个生态链。
而CyberOne V2的露面,终于交出了这份沉淀四年的答卷——不秀下限,死磕上限,把所有的狠劲儿都用在了那双能“出汗”的手上。
跨越最大的硬件瓶颈:为什么手比脚难造?
从资本市场到技术圈,具身智能的融资几乎每天都有,机器人在“脚力”上的进化更是神速,但翻书、系鞋带这些人类日常,对机器人仍是天方夜谭。
原因很简单:腿只要支撑和迈进,而手需要感知与交互。
在硬件工程上,手指空间极其逼仄。腿部关节可以放大电机半径来提升扭矩密度,但手指里的微型电机,线性尺寸缩小到1/10,扭矩可能只剩原来的1/1000。为了补扭矩,只能用极高的减速比(甚至288:1),随之而来的就是摩擦、齿隙和反射惯量,让仿真里轻巧的手指在现实里变得又硬又钝。
小米CyberOne V2
软件上同样卡脖子。人手动作映射到机器手上,面临着尺寸、关节数量和运动范围的差异,极易出现“穿模”或不可达。这也是为什么目前行业内出现了路线分化:有的主张舍弃小指做四指(如帕西尼,认为85%工业场景四指足够,还能降20%成本),有的甚至只做三指(如Sunday Robotics,强调可靠性);而小米、傅利叶、智元等厂商则坚定走向更具挑战的“仿生五指”路线。
为了100%复用人类操作数据,小米对CyberOne V2的仿生手进行了堪称重构的迭代:
- 1:1极致仿生:将手掌体积大幅压缩60%,尺寸与成年男性手部完全一致,同时自由度提升64%,达到22-27个DoF,惯量分布无限逼近真人。
- 15万次耐久拉锯:实验室里捏杯子容易,工厂里连打一万次螺丝,腱绳、弹簧就会断。小米在微小零件上反复迭代,最终突破了15万次抓握循环寿命。
- 全掌触觉覆盖:视觉一旦被遮挡,机器人就变瞎。小米创新性地引入“触觉手套”方案,人穿戴它采集操作数据,机器人就能完美继承“手感”,且磨损后只需换手套,维护成本极低。
最硬核的细节:一双会“出汗”的机器手
在CyberOne V2所有的进化中,最让人拍案叫绝的,是它模仿人类设计的“汗腺”。
为了在1:1的小臂空间内塞满高自由度电机,单手电机功率超过了100W,其中约30W会转化为废热。在没有任何外挂风扇的狭小密闭空间里,烧毁线路几乎是必然结局。
小米工程师从人类出汗散热的生理机制中找到了灵感。 他们利用金属3D打印技术,在紧凑的小臂结构中制作了微型液冷循环通道。通过微泵将热量转移到末端,再利用水分蒸发吸热来降温。
实测数据非常惊人:这套“仿生汗腺系统”,每分钟仅需蒸发0.5mL的水,就能提供约10W的主动散热能力。这就好比人在剧烈运动后微微出汗,不多不少,刚好带走最致命的那部分热量,让机器手能在高负载下持续稳定作业。
治好AI的“偷懒病”,机器人开始进厂打工
有了灵巧的躯壳,还需要聪明的脑子。两个月前,小米开源了面向具身智能的VLA模型——Xiaomi-Robotics-0,并公布了完整的真机后训练流程。
在训练中,小米团队发现了一个有趣的“偷懒效应”。为了让机器人动作丝滑不卡顿,业界常用异步推理和“动作前缀”技术,让新动作顺着上一帧的惯性走。结果AI学会了钻空子:过度依赖惯性,干脆不看摄像头的实时画面了。
为了治这毛病,小米引入了自适应加权损失、Λ型注意力掩码、前缀动作随机遮蔽三种机制。通俗点说,就是在训练时故意把“上一帧的答案”涂黑,逼着AI必须睁眼看当下的环境。
软硬件的双重突破,让小米机器人真正走进了自家汽车工厂。在自攻螺母上件工位,CyberOne已经能实现3小时持续无干预作业,双侧同时安装成功率达90.2%,且能跟上产线76秒的高速节拍。雷军更是放话:预计未来5年会有大批量人形机器人进入小米工厂干活。
结语:不翻跟头的机器人,离我们更近
大洋彼岸,马斯克为了防抄袭,将Optimus V3的发布藏了又藏;Figure则宣布产能暴增24倍,已交付超350台机器人。人形机器人的商业化正步入深水区。
回看小米,尽管整机成本从此前的60-70万元已大幅下降,但距离正式量产仍有距离。然而,从CyberOne V2的演进方向不难看出小米的逻辑:人形机器人决胜的关键,从来不是它能翻多高的跟头,而是它能不能稳稳地拧紧一颗螺丝、捏起一根羽毛、帮你收好一副耳机。
消失四年的“铁大”,不再追求做发布会上的花架子,而是脱下华丽的外衣,流着汗在工厂里当起了打工仔。对于一个致力于“连接人与万物”的科技生态来说,这或许是小米走向具身智能最踏实的一步。
文章来源:APPSO、澎湃新闻、央广网、南方财经网等公开资料
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...